


Connectez-vous ou créer un compte

Connectez-vous ou créer un compte
Licence 1 > Mécanique 1 > Cours 3 : oscillateurs
Ce chapitre est disponible en vidéos. La première vidéo de la playlist dédiée est disponible ici :
Vous pouvez également visionner le chapitre séquence par séquence :
Nous étudierons dans ce chapitre en premier lieu l’oscillateur harmonique solide-ressort horizontale, nous introduirons donc la force de rappel du ressort et nous découvrirons l’équation différentielle de l’oscillateur harmonique et sa solution.L’oscillateur solide-ressort vertical sera ensuite abordé : tout d’abord, ce sera l’occasion de retrouver l’équation différentielle de l’oscillateur harmonique, puis nous introduirons des frottements fluides pour voir le comportement du système. Enfin, nous aborderons un oscillateur à deux dimensions, le pendule simple. Cela permettra l’introduction de la base de projection polaire.
Soit un point M de masse \(m\) accroché à l’extrémité d’un ressort horizontal sans masse. Le point M se déplace sans frottement sur le plan horizontal. A \(t=0\), on écarte ce point de sa position d’équilibre d’une grandeur \(x_m\) puis on le lâche sans vitesse initiale. Quel est son mouvement, quels sont ses caractéristiques ?
Le point M de masse \(m\).
Référentiel lié au plan horizontal sur lequel se déplace le point M, référentiel terrestre considéré comme galiléen. On prendra une base cartésienne à une dimension : un axe Ox horizontal permettra de repérer le point M.
Le point M est soumis :
Cette force est proportionnelle à l'allongement du ressort et à une constante qui caractérise la raideur du ressort, $k$ appelée constante de raideur. L'allongement du ressort à un instant $t$ est défini par :
\begin{equation} \mathrm{allongement} = \ell - \ell_0 \Longrightarrow F_\mathrm{rappel} = k\times \mathrm{allongement} \end{equation}Si $\ell$ est la longueur du ressort à l'instant $t$ et $\ell_0$ sa longueur à vide c'est à dire au repos.
Observons deux situations pour connaître l'expression vectorielle de la force de rappel du ressort :
Ici, l'origine de l'axe des abscisses coïncide avec la longueur à vide du ressort. Ainsi, l'allongement du ressort est égal à l'abscisse : \(x = \ell - \ell_0\).
où \(k\) est la constante de rappel du ressort, elle s’exprime en \(\mathrm{N.m^{-1}}\).

La force de rappel d’un ressort s’écrit :
\begin{equation}\overrightarrow{F}= - k\times \mathrm{allongement}\times\overrightarrow{e_x} = - k\,(\ell - \ell_0)\,\overrightarrow{e_x}\end{equation}quel que soit l’état du ressort.
Appliquions la deuxième loi de Newton puis projetons-la sur la base de projection choisie :
\begin{equation}\begin{aligned} \sum \overrightarrow{F_{\mathrm{ext}}} = m\,\overrightarrow{a} &\Longrightarrow \overrightarrow{P} + \overrightarrow{R} + \overrightarrow{F} = m\,\overrightarrow{a} \\ \text{projection suivant Ox} &\Longrightarrow -k\,x = m\,\ddot x \\ & \Longleftrightarrow \boxed{\ddot x + \dfrac{k}{m}\,x = 0}\end{aligned}\end{equation}L’équation différentielle précédente s’écrit généralement de la manière suivante :
\begin{equation}\boxed{ \ddot x + \omega_0^2\,x = 0 }\end{equation}avec \(\omega_0\) nommée pulsation propre.
Mathématiquement, cette équation a pour solution une fonction sinusoïdale :
\begin{equation}x(t) = A\,\cos\,(\omega_0\,t + \phi)\end{equation}où \(A\) et \(\phi\) sont des constantes déterminées à partir des conditions initiale. \(A\) est appelé amplitude et s’exprime en mètre (m) et \(\phi\) phase à l’origine exprimée en radian (rad).
La solution s’écrit donc :
\begin{equation}\boxed{x(t) = x_m\,\cos\,\omega_0\,t}\end{equation}Les oscillations du point M sont sinusoïdales d’amplitude \(x_m\) et de période propre :
\begin{equation}\boxed{ T_0 = \dfrac{2\pi}{\omega_0} = 2\pi\,\sqrt{\dfrac{m}{k}} }\end{equation}L’oscillateur est qualifié d’harmonique car ses oscillations sont d’amplitude constante, et de période propre également constante dont la valeur ne dépend que des caractéristiques du système solide-ressort.

L’équation différentielle de l’oscillateur harmonique a pour expression :
\begin{equation}\ddot x + \omega_0^2\,x = 0 \quad \text{avec} \quad \omega_0^2 = \dfrac{k}{m}\end{equation}Les oscillations ont pour expression :
\begin{equation}x(t) = x_m\,\cos\,(\omega_0\,t) = x_m\,\cos\,\left(\dfrac{2\pi}{T_0}t\right) \quad \text{avec} \quad T_0 = 2\pi\,\sqrt{\dfrac{m}{k}}\end{equation}Soit un point M de masse \(m\) accroché à l’extrémité d’un ressort vertical sans masse. A \(t=0\), on écarte ce point de sa position d’équilibre d’une grandeur \(x_m\) puis on le lâche sans vitesse initiale. Quel est son mouvement, quels sont ses caractéristiques?
Le système est toujours le point M de masse \(m\), le référentiel toujours terrestre et galiléen et le bilan des forces est identique. On choisira aussi une base cartésienne à une dimension, un axe Ox, vertical descendant.
Ici, l'origine de l'axe des abscisses ne coïncide pas avec la longueur à vide du ressort :
La force de tension s’écrit toujours :
\begin{equation}\overrightarrow{T}=- k\,(\ell-\ell_0)\overrightarrow{e_x}\end{equation}elle n'est pas nulle à l'équilibre.

PFD appliqué à la masse et projeté sur l’axe O$x$:
\begin{equation}\begin{aligned} m\,\ddot x&=m\,g - k\,(\ell-\ell_0) \\ \Longleftrightarrow m\,\ddot x &=m\,g - k\,(x+\ell_{éq}-\ell_0) \\ \Longleftrightarrow m\,\ddot x &=m\,g - k\,x -k\,(\ell_{éq}-\ell_0) \end{aligned}\end{equation}Or à l’équilibre :
\begin{equation}m\,g - k\,(\ell_{éq}-\ell_0) = 0\end{equation}Donc devient :
\begin{equation}m\,\ddot x =- k\,x \Longleftrightarrow \boxed{\ddot x +\dfrac{k}{m}x = 0}\end{equation}On retrouve donc la même équation que celle obtenue pour le ressort horizontal, la solution sera identique ... On peut reprendre à ce niveau tout le paragraphe [solution].
Un enfant, assimilé à un point matériel M de masse \(m\), est assis sur une balançoire. Les cordes de la balançoire sont inextensibles, de longueur \(\ell\) et n’ont pas de masse. Un adulte écarte d’un petit angle l’enfant de sa position d’équilibre puis la lâche sans vitesse initiale. On néglige tous les frottements.Quel est le mouvement de l’enfant? les caractéristiques de celui-ci?
L’enfant de masse \(m\).
On choisira un référentiel lié à un observateur posé, par exemple, sur le support de la balançoire. C’est un référentiel terrestre supposé galiléen le temps du mouvement de l’enfant.
Lorsque l’on a à faire à un mouvement de rotation autour d’un axe fixe, par exemple lorsque le solide en mouvement peut être repéré facilement par un angle ; l’utilisation de la base polaire (2D) est judicieuse.
Cette base est une base mobile composée de deux vecteurs perpendiculaires entre eux :
On repère alors le point M par une longueur, ici \(\ell\), et par un angle \(\theta\).

Comme le montre les pointillés sur la figure ci-dessus, il est facile de passer de la base polaire à la base cartésienne et inversement :
De la même manière, les vecteurs unitaires (\(\overrightarrow{u}_r\); \(\overrightarrow{u}_{\theta}\)) peuvent s’exprimer en fonction des vecteurs unitaires de la base cartésienne (\(\overrightarrow{u}_x\); \(\overrightarrow{u}_y\)) :
\begin{equation}\boxed{ \overrightarrow{u}_r = \cos\,\theta\,\overrightarrow{u}_x + \sin\,\theta\,\overrightarrow{u}_y \qquad \qquad \overrightarrow{u}_{\theta} = -\sin\,\theta\,\overrightarrow{u}_x + \cos\,\theta\,\overrightarrow{u}_y } \end{equation}La difficulté par rapport au travail avec une base cartésienne est que les vecteur de la base polaire sont mobiles, ils sont donc une dérivée par rapport au temps qui est non nulle.
Regardons ce que vaut \(\dfrac{\mathrm{d}\overrightarrow{u}_r}{\mathrm{d}t}\) :
\begin{equation}\dfrac{\mathrm{d}\overrightarrow{u}_r}{\mathrm{d}t} = \dfrac{\mathrm{d}\overrightarrow{u}_r}{\mathrm{d}\theta} \times \dfrac{\mathrm{d}\theta}{\mathrm{d}t} = \dfrac{\mathrm{d}\overrightarrow{u}_r}{\mathrm{d}\theta} \times \dot \theta\end{equation}Or d’après la relation (17) :
\begin{equation}\dfrac{\mathrm{d}\overrightarrow{u}_r}{\mathrm{d}\theta} = -\sin\,\theta\,\overrightarrow{u}_x + \cos\,\theta\,\overrightarrow{u}_y = \overrightarrow{u}_{\theta}\end{equation}Donc :
\begin{equation}\dfrac{\mathrm{d}\overrightarrow{u}_r}{\mathrm{d}t} = \dot \theta \, \overrightarrow{u}_{\theta}\end{equation}Et :
\begin{equation}\boxed{\overrightarrow{v} = \dot \ell\,\overrightarrow{u}_r + \ell\,\dot \theta\,\overrightarrow{u}_{\theta}}\end{equation}Remarque
La grandeur \(\dfrac{\mathrm{d}\theta}{\mathrm{d}t} = \dot \theta\) pourra être notée \(\omega\) et être appelée vitesse angulaire.
On procède de la même manière que pour le vecteur vitesse pour obtenir :
\begin{equation}\boxed{\overrightarrow{a} = (\ddot \ell - \ell\,\dot \theta^2)\overrightarrow{u}_r + (2\,\dot \ell\,\dot \theta + \ell\,\ddot \theta) \overrightarrow{u}_{\theta}}\end{equation}
Sur le point M s’exerce deux forces :

On applique le PFD au point M, on le projette sur la base polaire (\(\overrightarrow{u}_r\), \(\overrightarrow{u}_{\theta}\)):
\begin{equation}\sum \overrightarrow{F_{\mathrm{ext}}} =\overrightarrow{P} + \overrightarrow{T} = m\,\overrightarrow{a} \Longrightarrow \left\{\begin{array}{l} \text{Sur}\,\overrightarrow{u}_r :\quad m\,g\,\cos\,\theta - T = m(\ddot \ell - \ell \dot \theta^2) \\ \text{Sur}\,\overrightarrow{u}_{\theta} :\quad -m\,g\,\sin\,\theta = m(2\,\dot\ell \dot \theta + \ell\,\ddot \theta) \end{array}\right.\end{equation}Mais le fil est inextensible : \(\dot \ell = 0\), d’où:
\begin{equation}\left\{\begin{array}{l} \text{Sur}\,\overrightarrow{u}_r :\quad m\,g\,\cos\,\theta - T = - m\,\ell \dot \theta^2 \\ \text{Sur}\,\overrightarrow{u}_{\theta} :\quad -m\,g\,\sin\,\theta = m\,\ell\,\ddot \theta \end{array}\right.\end{equation}La première équation est celle qui décrit le mouvement de l’enfant, la deuxième donne la tension du fil en fonction de l’angle \(\theta\).
Enfin, on se place dans l’approximation des petites angles, \(\theta\) est petit et \(\sin\,\theta \simeq \theta\). Alors :
\begin{equation}\boxed{ \ddot \theta + \dfrac{g}{\ell}\,\theta = 0}\end{equation}L’équation obtenue précédemment ressemble étrangement à celle du pendule élastique. La solution s’écrit :
\begin{equation}\boxed{\theta = \theta_m\,\cos\,(\omega_0\,t + \phi) \qquad \text{avec } \omega_0 = \dfrac{2\,\pi}{T_0} = \sqrt{\dfrac{g}{\ell}}}\end{equation}avec \(\theta_m\) et \(\phi\) des constantes déterminées grâce aux conditions initiales.
L’enfant oscille donc indéfiniment (pas de frottement) à la période :
\begin{equation}\boxed{ T_0 = 2\pi \sqrt{\dfrac{\ell}{g}}}\end{equation}Le pendule simple est un oscillateur harmonique.
On reprend l’exemple des oscillateurs précédents : système masse-ressort horizontal ou vertical, ou balançoire. Mais cette fois-ci, des frottements fluides viennent freiner le point M dans son mouvement.Comment ce mouvement est-il modifié? quelles sont ces nouvelles caractéristiques?
La masse accrochée au ressort est maintenant soumise en plus des forces déjà évoquées à une force de frottement fluide d’expression \(\overrightarrow{f}=-\alpha\,\overrightarrow{v}\) (le \(k\) est déjà pris, nous sommes dans le cas de petites vitesses donc de frottements linéaires). L’équation différentielle (issue du PFD appliqué à la masse et projeté sur un axe colinéaire au ressort) qui régit l’oscillation de la masse s’obtient de la façon suivante :
\begin{equation}\begin{aligned} \text{PFD :} \quad &\overrightarrow{P} + \overrightarrow{R} + \overrightarrow{f} + \overrightarrow{T} = m\,\overrightarrow{a} \\ \text{Projection}\; \Longrightarrow \;& m\,\ddot x = -k\,x -\alpha\,\dot x \\ \Longleftrightarrow \;&\boxed{\ddot x + \dfrac{\alpha}{m}\,\dot x + \dfrac{k}{m}\,x = 0} \end{aligned}\end{equation}Cete équation différentielle peut se noter de trois façons différents, qui font intervenir différentes grandeurs caractéristiques du système :
Une équation différentielle du type de l’équation se résout à partir de son équation caractéristique :
\begin{equation}\ddot x + 2\,\lambda\,\dot x + \omega_0^2\,x = 0 \Longrightarrow \boxed{r^2 + 2\,\lambda\,r + \omega_0^2 = 0}\end{equation}A partir des racines \(r_1\) et \(r_2\) de l’équation caractéristique, on construit la solution de la manière suivante :
\begin{equation}x(t) = A\,\times e^{(r_1\,t)} + B\,\times e^{(r_2\,t)}\end{equation}La nature de \(r_1\) et \(r_2\) et de \(A\) et \(B\) dépend du signe du déterminant de l’équation caractéristique : selon ce signe, on obtient différents régimes.
Dans ce cas le discriminant est négatif :
\begin{equation}\Delta = 4\,\lambda^2 - 4\,\omega_0^2 < 0 \Longleftrightarrow \boxed{\lambda < \omega_0 \Longleftrightarrow Q > \dfrac{1}{2}}\end{equation}Et les deux racines de l’équation caractéristique \(r_1\) et \(r_2\) sont complexes, conjuguées entre elles :
\begin{equation}r_{\pm} = -\lambda \pm j\,\sqrt{\omega_0^2-\lambda^2} = -\lambda \pm j\,\omega\end{equation}Remarque
En physique, mais surtout en électricité, le nombre complexe est noté \(j\) (\(j^2 = -1\))
Le paramètre \(\omega\) est appelé pseudo-pulsation des oscillations.
En effet, la solution \(x(t)\) dans le cas du régime pseudo-périodique s’écrit :
\begin{equation}\boxed{ x(t) = X\, e^{(-\lambda\,t)}\,\cos\,(\omega\,t+\phi)}\end{equation}Avec \(X\) et \(\phi\) des constantes déterminées à l’aide des conditions initiales (de position et de vitesse).
Remarque
On trouvera aussi une solution de forme suivante :
Les oscillations ont alors l’allure suivante :
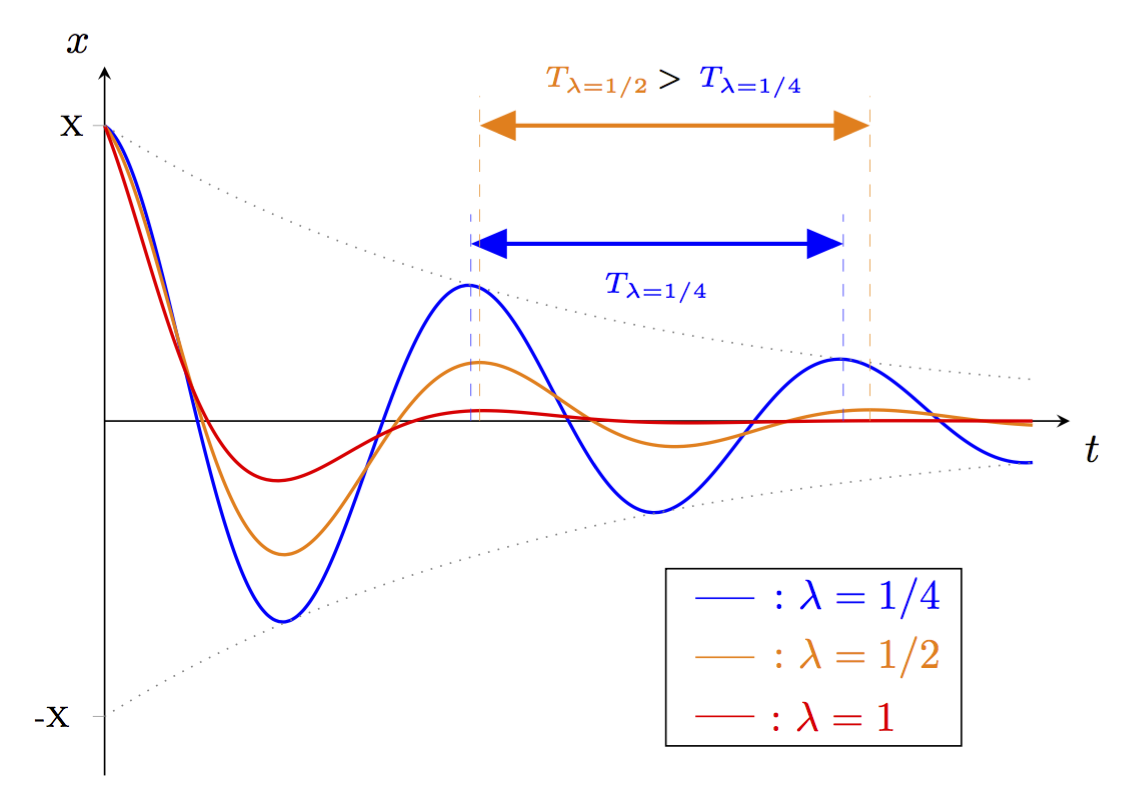
Ces oscillations sont caractérisées par la pseudo-pulsation \(\omega = \sqrt{\omega_0^2-\lambda^2}\), donc une pseudo-période égale à \(T = \dfrac{2\pi}{\sqrt{\omega_0^2-\lambda^2}}\). Cette pseudo-période est souvent proche (amortissement faible) de la période propre de l’oscillateur, mais elle est légèrement plus grande.
Une autre grandeur que la pseudo-période permet de caractériser ces oscillations, il s’agit du décrément logarithmique qui permet de quantifier l’amortissement des oscillations, leur décroissance. Il est définit par :
\begin{equation}\delta = \ln\,\dfrac{A(t)}{A(t+T)}\end{equation}où A représente l’amplitude des oscillations. Généralement pour le calculer, on prend deux maximas successifs de la courbe \(x(t)\).On peut également montrer (à partir de l’expression de \(x(t)\)) que \(\delta = \lambda\,T\).
Ici, le discriminant est positif :
\begin{equation}\Delta = 4\,\lambda^2 - 4\,\omega_0^2 > 0 \Longleftrightarrow \boxed{\lambda > \omega_0 \Longleftrightarrow Q < \dfrac{1}{2}}\end{equation}Les deux racines de l’équation caractéristique sont réelles et opposées :
\begin{equation}r_{\pm} = - \lambda \pm \sqrt{\lambda^2-\omega_0^2}\end{equation}Dans ce cas, la solution s’écrit :
\begin{equation}x(t) = A\,\times e^(r_{-}\,t) + B\,\times e^(r_{+}\,t)\end{equation}C’est à dire la somme de deux exponentielles décroissantes car les solutions \(r_{\pm}\) sont négatives (\(\sqrt{\lambda^2-\omega_0^2} < \lambda\)).
Il n’y a pas d’oscillations d’où un régime nommé apériodique.

Ce régime s’obtient lorsque le discriminant de l’équation caractéristique associé à l’équation différentielle vaut 0. On alors \(\lambda = \omega_0\) et \(Q = \dfrac{1}{2}\). Ce régime est celui qui permet à l’oscillateur de revenir le plus rapidement à l’équilibre. Son allure est la même que celle d’un régime apériodique.
Retrouver, entre autres, des contenus de travaux pratiques, produits par l'équipe de physique de l'ENSCR



